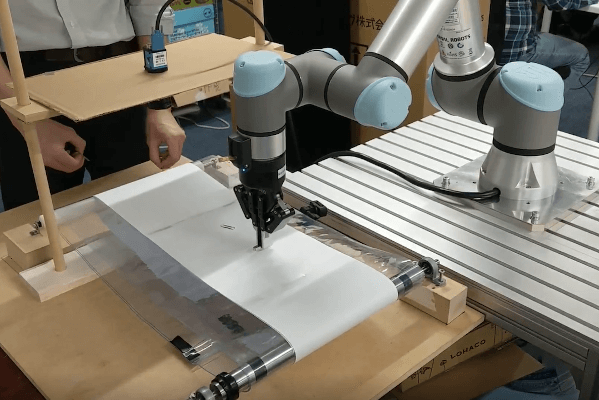
ユニバーサルロボット社の「UR5e」の実機を使って先日アップした動画『AI異物検出 +「UR5」ロボットアーム連携 ROSシミュレーション(Gazebo上でシミュレーション)』で実証実験をおこないました。
AIがベルトコンベア上のクリップを検知し、ロボットアームへ位置情報を連携して取り除きます。
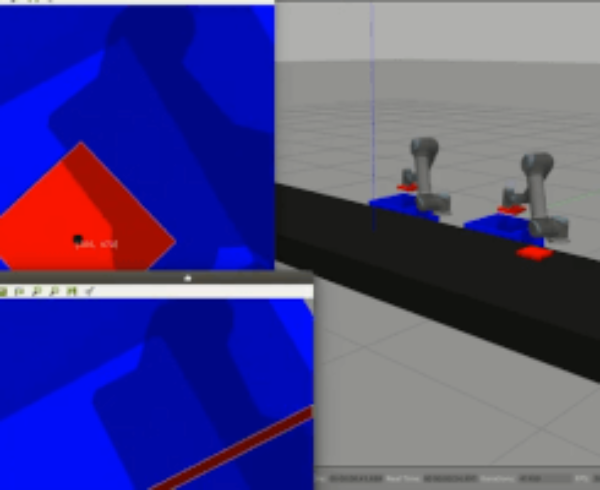
画面上に表示される小さな長方形の動画は、ベルトコンベアに取り付けたハイスピードカメラの映像で、赤のラインがAI判断エリアです。
ユニバーサルロボット社の「UR5e」の実機を使って先日アップした動画『AI異物検出 +「UR5」ロボットアーム連携 ROSシミュレーション(Gazebo上でシミュレーション)』で実証実験をおこないました。
AIがベルトコンベア上のクリップを検知し、ロボットアームへ位置情報を連携して取り除きます。
画面上に表示される小さな長方形の動画は、ベルトコンベアに取り付けたハイスピードカメラの映像で、赤のラインがAI判断エリアです。
社内で研究開発中の多関節ロボット、協働ロボットのROSシミュレーションRead more

人の声(指示)で自由に動き回るかわいい!?モコロボットの検証実験動画でRead more
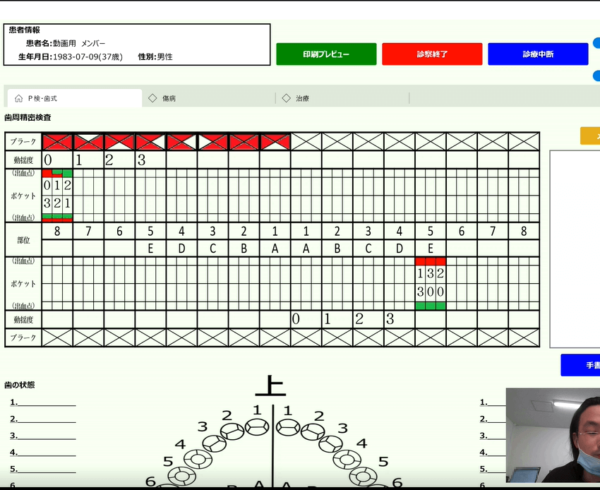
主治医が声で指示した歯周基本検査の内容や口腔情報などをAI(人工知能)Read more
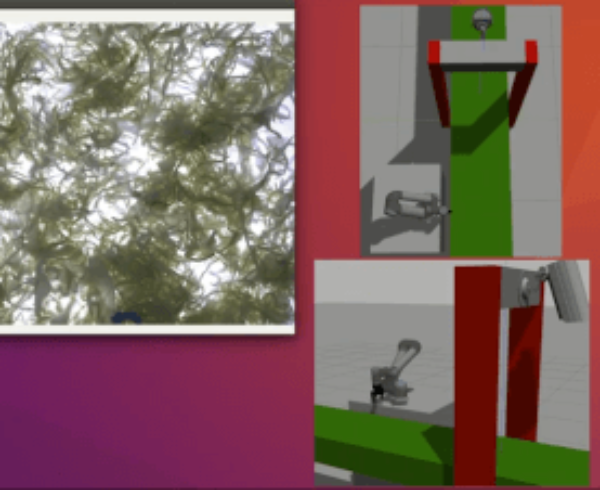
AIの物体検出を技術を使用してベルトコンベア上のカット野菜の中の髪(異Read more
エッジAIでリアルタイムに商業施設の混雑状況を可視化 新型コロナウィルRead more

AI技術とユニバーサルロボット社「UR5e」のロボットアームが連携してRead more
Leave a Comment